ਹਾਲ ਹੀ ਵਿੱਚ, JSR ਦੇ ਇੱਕ ਗਾਹਕ ਦੋਸਤ ਨੇ ਇੱਕ ਰੋਬੋਟ ਵੈਲਡਿੰਗ ਪ੍ਰੈਸ਼ਰ ਟੈਂਕ ਪ੍ਰੋਜੈਕਟ ਨੂੰ ਅਨੁਕੂਲਿਤ ਕੀਤਾ। ਗਾਹਕ ਦੇ ਵਰਕਪੀਸ ਵਿੱਚ ਕਈ ਤਰ੍ਹਾਂ ਦੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਹਨ ਅਤੇ ਵੈਲਡ ਕਰਨ ਲਈ ਬਹੁਤ ਸਾਰੇ ਹਿੱਸੇ ਹਨ। ਇੱਕ ਆਟੋਮੇਟਿਡ ਏਕੀਕ੍ਰਿਤ ਹੱਲ ਡਿਜ਼ਾਈਨ ਕਰਦੇ ਸਮੇਂ, ਇਹ ਪੁਸ਼ਟੀ ਕਰਨਾ ਜ਼ਰੂਰੀ ਹੁੰਦਾ ਹੈ ਕਿ ਗਾਹਕ ਕ੍ਰਮਵਾਰ ਵੈਲਡਿੰਗ ਕਰ ਰਿਹਾ ਹੈ ਜਾਂ ਸਪਾਟ ਵੈਲਡਿੰਗ ਕਰ ਰਿਹਾ ਹੈ ਅਤੇ ਫਿਰ ਰੋਬੋਟ ਦੀ ਪੂਰੀ ਵਰਤੋਂ ਕਰ ਰਿਹਾ ਹੈ। ਇਸ ਸਮੇਂ ਦੌਰਾਨ, ਮੈਂ ਪਾਇਆ ਕਿ ਉਸਨੂੰ ਪੋਜੀਸ਼ਨਰ ਦੀ ਚੋਣ ਬਾਰੇ ਸ਼ੱਕ ਸੀ, ਇਸ ਲਈ JSR ਨੇ ਇਸਨੂੰ ਸਾਰਿਆਂ ਨਾਲ ਸੰਖੇਪ ਵਿੱਚ ਪੇਸ਼ ਕੀਤਾ।
ਡੁਅਲ-ਸਟੇਸ਼ਨ ਸਿੰਗਲ-ਐਕਸਿਸ ਹੈੱਡਸਟਾਕ ਅਤੇ ਟੇਲਸਟਾਕ ਵਰਟੀਕਲ ਫਲਿੱਪ ਪੋਜੀਸ਼ਨਰ
VS ਥ੍ਰੀ-ਐਕਸਿਸ ਵਰਟੀਕਲ ਫਲਿੱਪ ਪੋਜੀਸ਼ਨਰ
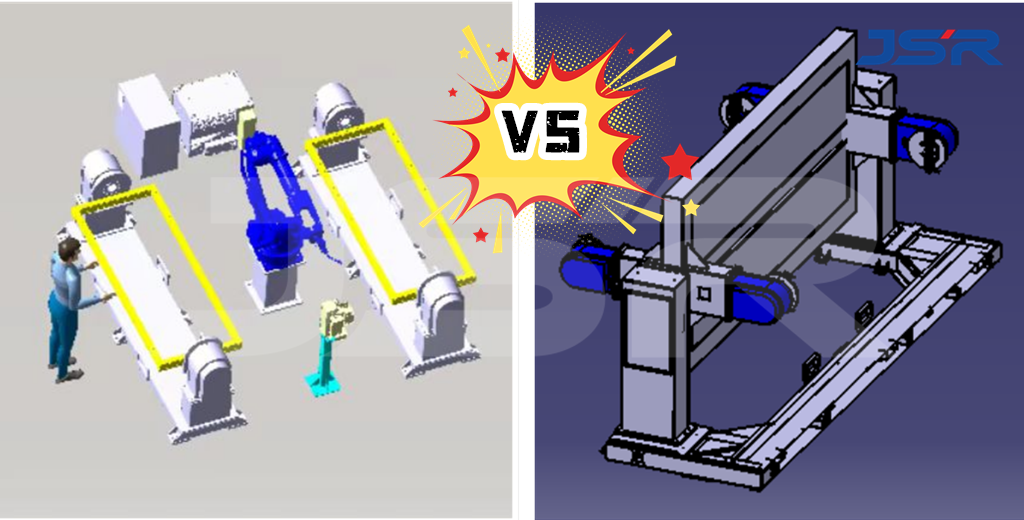
ਰੋਬੋਟ ਵੈਲਡਿੰਗ ਵਰਕਸਟੇਸ਼ਨ ਵਿੱਚ, ਡੁਅਲ-ਸਟੇਸ਼ਨ ਸਿੰਗਲ-ਐਕਸਿਸ ਹੈੱਡਸਟਾਕ ਅਤੇ ਟੇਲਸਟਾਕ ਵਰਟੀਕਲ ਫਲਿੱਪ ਪੋਜੀਸ਼ਨਰ ਅਤੇ ਥ੍ਰੀ-ਐਕਸਿਸ ਵਰਟੀਕਲ ਫਲਿੱਪ ਪੋਜੀਸ਼ਨਰ ਦੋ ਆਮ ਪੋਜੀਸ਼ਨਿੰਗ ਉਪਕਰਣ ਹਨ, ਅਤੇ ਵੱਖ-ਵੱਖ ਐਪਲੀਕੇਸ਼ਨ ਦ੍ਰਿਸ਼ਾਂ ਵਿੱਚ ਉਹਨਾਂ ਦੇ ਆਪਣੇ ਫਾਇਦੇ ਹਨ।
ਇਹਨਾਂ ਦੇ ਐਪਲੀਕੇਸ਼ਨ ਦ੍ਰਿਸ਼ ਅਤੇ ਤੁਲਨਾਵਾਂ ਹੇਠਾਂ ਦਿੱਤੀਆਂ ਗਈਆਂ ਹਨ:
ਦੋਹਰਾ-ਸਟੇਸ਼ਨ ਸਿੰਗਲ-ਐਕਸਿਸ ਹੈੱਡ ਅਤੇ ਟੇਲ ਫਰੇਮ ਪੋਜੀਸ਼ਨਰ:
ਇਹ ਉਹਨਾਂ ਦ੍ਰਿਸ਼ਾਂ ਲਈ ਢੁਕਵਾਂ ਹੈ ਜਿੱਥੇ ਵੈਲਡਿੰਗ ਪ੍ਰਕਿਰਿਆ ਦੌਰਾਨ ਵਰਕਪੀਸ ਨੂੰ ਘੁੰਮਾਉਣ ਅਤੇ ਸਥਿਤੀ ਵਿੱਚ ਰੱਖਣ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ। ਉਦਾਹਰਨ ਲਈ, ਕਾਰ ਬਾਡੀ ਵੈਲਡਿੰਗ ਉਤਪਾਦਨ ਲਾਈਨ ਵਿੱਚ, ਇੱਕੋ ਸਮੇਂ ਦੋ ਸਟੇਸ਼ਨਾਂ 'ਤੇ ਦੋ ਵਰਕਪੀਸ ਸਥਾਪਿਤ ਕੀਤੇ ਜਾ ਸਕਦੇ ਹਨ, ਅਤੇ ਵਰਕਪੀਸ ਦੀ ਰੋਟੇਸ਼ਨ ਅਤੇ ਸਥਿਤੀ ਇੱਕ ਸਿੰਗਲ-ਐਕਸਿਸ ਹੈੱਡ ਅਤੇ ਟੇਲਸਟਾਕ ਪੋਜੀਸ਼ਨਰ ਦੁਆਰਾ ਪ੍ਰਾਪਤ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ, ਇਸ ਤਰ੍ਹਾਂ ਉਤਪਾਦਨ ਕੁਸ਼ਲਤਾ ਵਿੱਚ ਸੁਧਾਰ ਹੁੰਦਾ ਹੈ।
https://youtube.com/shorts/JPn-iKsRvj0
ਤਿੰਨ-ਧੁਰੀ ਵਾਲਾ ਲੰਬਕਾਰੀ ਫਲਿੱਪ ਪੋਜੀਸ਼ਨਰ:
ਗੁੰਝਲਦਾਰ ਵੈਲਡਿੰਗ ਦ੍ਰਿਸ਼ਾਂ ਲਈ ਆਦਰਸ਼ ਜਿਨ੍ਹਾਂ ਲਈ ਵਰਕਪੀਸ ਨੂੰ ਕਈ ਦਿਸ਼ਾਵਾਂ ਵਿੱਚ ਘੁੰਮਾਉਣ ਅਤੇ ਫਲਿੱਪ ਕਰਨ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ। ਉਦਾਹਰਣ ਵਜੋਂ, ਏਰੋਸਪੇਸ ਉਦਯੋਗ ਵਿੱਚ, ਜਹਾਜ਼ ਦੇ ਫਿਊਜ਼ਲੇਜਾਂ ਦੀ ਗੁੰਝਲਦਾਰ ਵੈਲਡਿੰਗ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ। ਤਿੰਨ-ਧੁਰੀ ਵਾਲਾ ਵਰਟੀਕਲ ਫਲਿੱਪ ਪੋਜੀਸ਼ਨਰ ਵੱਖ-ਵੱਖ ਕੋਣਾਂ 'ਤੇ ਵੈਲਡਿੰਗ ਦੀਆਂ ਜ਼ਰੂਰਤਾਂ ਨੂੰ ਪੂਰਾ ਕਰਨ ਲਈ ਖਿਤਿਜੀ ਅਤੇ ਲੰਬਕਾਰੀ ਦਿਸ਼ਾਵਾਂ ਵਿੱਚ ਵਰਕਪੀਸ ਦੇ ਮਲਟੀ-ਧੁਰੀ ਰੋਟੇਸ਼ਨ ਅਤੇ ਫਲਿੱਪ ਨੂੰ ਮਹਿਸੂਸ ਕਰ ਸਕਦਾ ਹੈ।
https://youtu.be/v065VoPALf8
ਫਾਇਦੇ ਦੀ ਤੁਲਨਾ:
ਦੋਹਰਾ-ਸਟੇਸ਼ਨ ਸਿੰਗਲ-ਐਕਸਿਸ ਹੈੱਡ ਅਤੇ ਟੇਲ ਫਰੇਮ ਪੋਜੀਸ਼ਨਰ:
- ਸਧਾਰਨ ਬਣਤਰ, ਚਲਾਉਣ ਅਤੇ ਰੱਖ-ਰਖਾਅ ਵਿੱਚ ਆਸਾਨ।
- ਉਤਪਾਦਨ ਕੁਸ਼ਲਤਾ ਨੂੰ ਬਿਹਤਰ ਬਣਾਉਣ ਲਈ ਇੱਕੋ ਸਮੇਂ ਦੋ ਵਰਕਪੀਸਾਂ ਨੂੰ ਪ੍ਰੋਸੈਸ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ।
- ਕੁਝ ਸਰਲ ਵੈਲਡਿੰਗ ਕੰਮਾਂ ਲਈ ਢੁਕਵਾਂ, ਜਿਵੇਂ ਕਿ ਵਰਕਪੀਸ ਜਿਨ੍ਹਾਂ ਲਈ ਘੁੰਮਣ ਦੇ ਇੱਕ ਧੁਰੇ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ।
- ਇਸਦੀ ਕੀਮਤ ਤਿੰਨ-ਧੁਰੀ ਵਾਲੇ ਵਰਟੀਕਲ ਫਲਿੱਪ ਪੋਜੀਸ਼ਨਰ ਨਾਲੋਂ ਸਸਤੀ ਹੈ।
- ਵੈਲਡਿੰਗ ਨੂੰ ਖੱਬੇ ਅਤੇ ਸੱਜੇ ਸਟੇਸ਼ਨਾਂ ਵਿਚਕਾਰ ਬਦਲਿਆ ਜਾਂਦਾ ਹੈ। ਇੱਕ ਸਟੇਸ਼ਨ 'ਤੇ ਵੈਲਡਿੰਗ ਕਰਦੇ ਸਮੇਂ, ਕਾਮਿਆਂ ਨੂੰ ਦੂਜੇ ਪਾਸੇ ਸਮੱਗਰੀ ਲੋਡ ਅਤੇ ਅਨਲੋਡ ਕਰਨ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ।
ਤਿੰਨ-ਧੁਰੀ ਵਾਲਾ ਲੰਬਕਾਰੀ ਫਲਿੱਪ ਪੋਜੀਸ਼ਨਰ:
- ਇਹ ਮਲਟੀ-ਐਕਸਿਸ ਰੋਟੇਸ਼ਨ ਅਤੇ ਫਲਿੱਪਿੰਗ ਨੂੰ ਮਹਿਸੂਸ ਕਰ ਸਕਦਾ ਹੈ ਅਤੇ ਗੁੰਝਲਦਾਰ ਵੈਲਡਿੰਗ ਕਾਰਜਾਂ ਲਈ ਢੁਕਵਾਂ ਹੈ।
- ਰੋਬੋਟ ਵੈਲਡਿੰਗ ਦੌਰਾਨ, ਕਾਮਿਆਂ ਨੂੰ ਸਿਰਫ਼ ਇੱਕ ਪਾਸੇ ਵਰਕਪੀਸ ਦੀ ਲੋਡਿੰਗ ਅਤੇ ਅਨਲੋਡਿੰਗ ਪੂਰੀ ਕਰਨ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ।
- ਵਧੇਰੇ ਸਥਿਤੀ ਲਚਕਤਾ ਅਤੇ ਸ਼ੁੱਧਤਾ ਪ੍ਰਦਾਨ ਕਰਦਾ ਹੈ, ਜੋ ਕਿ ਵੱਖ-ਵੱਖ ਵੈਲਡਿੰਗ ਕੋਣਾਂ ਦੀਆਂ ਜ਼ਰੂਰਤਾਂ ਨੂੰ ਪੂਰਾ ਕਰ ਸਕਦਾ ਹੈ।
- ਉੱਚ ਵੈਲਡਿੰਗ ਗੁਣਵੱਤਾ ਅਤੇ ਸ਼ੁੱਧਤਾ ਜ਼ਰੂਰਤਾਂ ਵਾਲੇ ਵਰਕਪੀਸ ਲਈ ਢੁਕਵਾਂ।
ਸੰਖੇਪ ਵਿੱਚ, ਇੱਕ ਢੁਕਵੇਂ ਪੋਜੀਸ਼ਨਰ ਦੀ ਚੋਣ ਖਾਸ ਵੈਲਡਿੰਗ ਕਾਰਜ ਜ਼ਰੂਰਤਾਂ 'ਤੇ ਨਿਰਭਰ ਕਰਦੀ ਹੈ, ਜਿਸ ਵਿੱਚ ਵਰਕਪੀਸ ਦੀ ਗੁੰਝਲਤਾ, ਵੈਲਡਿੰਗ ਕੋਣ, ਉਤਪਾਦਨ ਕੁਸ਼ਲਤਾ ਅਤੇ ਵੈਲਡਿੰਗ ਗੁਣਵੱਤਾ ਜ਼ਰੂਰਤਾਂ ਵਰਗੇ ਕਾਰਕ ਸ਼ਾਮਲ ਹਨ।
ਪੋਸਟ ਸਮਾਂ: ਫਰਵਰੀ-20-2024
